作業員を資材運搬作業から解放
2020年2月19日、株式会社大林組は、建設現場内の資材搬送において、AGV(Automated Guided Vehicle 無人搬送車)とエレベーターを連携して制御することで、階数を問わずに自律的な搬送を可能とするロジスティクスシステム(以下、同システム)を開発したと発表した。
少子高齢化が進展し労働者人口が減少するに伴い、建設現場では、大量の資材を運搬する労務の効率化が求められている。
このようななか、同社は、資材を自動搬送するAGVを開発し、フロア内の運搬作業を機械で代替することで生産性の向上に取り組んできた。しかしながら、トラックで建物の1階に搬入した資材を、エレベーターで目的の上層階へ揚重する際には、オペレーターを呼び出すなど、作業員を介在させる必要があった。
今回開発した同システムは、搬入階から目的とする上層階までの搬送を完全に自動化するシステムで、作業員は、資材運搬作業から解放され、施工業務に専念することが可能となる。
今回開発したロジスティクスシステムの特長
同システムでは、事前に資材の搬送スケジュールを入力する際に、資材の搬送元と搬送先のエリアを指定すると、建設現場内に設置した複数の天井カメラの映像から資材の位置などを認識し、用意した地図に従って搬送先まで自律的に経路を設定する。さらに、複数のAGVに順次搬送指示を与えるとともに、エレベーターを連動するように制御する。
また、スイスのStoecklin Logistik AG社と共同で、同システムの指示下で動作するフォークリフト型のAGVを開発した。同AGVはレーザーセンサーで資材の幅を計測し、それに合わせた安全領域を自動で設定するため、最適な経路を選択して搬送できる。
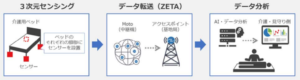
さらに、天井に設置したカメラの俯瞰画像から荷物の位置と置き方に問題がないかをチェックするとともに、AIが作業領域への人の侵入を瞬時に検知し、危険と判断した場合にはAGVの動作を停止する。この際、メインサーバーが複数のAGVとエレベーターの状況を把握し統合的に管理するため、個別のAGVが判断する従来システムより安全性を高めることができる。
一方、管理者はタブレットなどでAGVの位置やエレベーターの稼働状況を監視できるため、異常があれば即座に対応することが可能だ。
(画像はプレスリリースより)
▼外部リンク
株式会社大林組 プレスリリース
https://www.obayashi.co.jp/news/detail/news20200219_1.html