内閣府及び準天頂衛星システムサービス株式会社による公募「みちびきを利用した実証事業」に採択された、弊社の実証事業概要を下記のとおりお知らせいたします。
1.実証事業名
みちびき対応cm級受信機とスレーブRTKによる姿勢角検出実証実験と制御系への適用
2.概要
(1)現状の課題
現在の衛星測位技術では、PPP、PPP-RTK、RTK等の高精度衛星測位受信機を自動運転や無人移動体等へ適用する場合、受信機単体では姿勢角の計測が出来ない為、主にIMU(Inertial Measurement Unit/慣性計測装置)とのカップリングで補完されているのが一般的です。但し、IMUとのカップリングでは、下記の問題点が散見されます。
・最初にイニシャライズが必要(一定時間の直進走行など)。
・停止時間が長いとセンサーからの情報が飽和し、停止状態での姿勢角の精度が落ちる。
・IMUの設置に高い精度が求められ、付替えが不便。
・スリップ状態での計測やドローン・船舶のように横滑りするプラットフォームへの適用には不向き(COGとHeadingが一致しないケース)。
(2)実証実験の内容(課題解決のための手法)
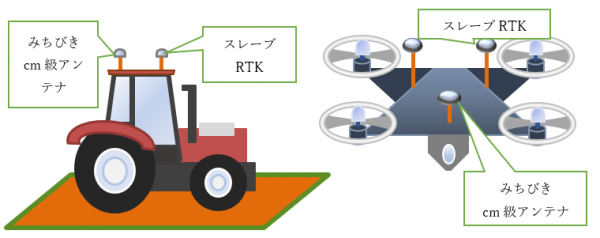
上記の課題に関し、みちびき対応cm級受信機(CLAS/MADOCA)を移動する基準局(ムービングベース)とみなし、これに対応する1~3セットのスレーブRTK移動局との組合せで、停止中やスリップが発生している状況でも、正確なHeadingとCOG、RollやPitchの出力が可能となります。これらの情報を無人移動体やドローン等の制御系へ送る事で、非常にシンプルな構成でありながら自動運転の精度や安定性・応答性を更に向上させる事ができます。
本事業では、みちびき対応cm級受信機(CLAS/MADOCA)を複数台使用し連携させる事で、GNSS受信機単体では計測が出来無い、姿勢情報(Heading、Roll、Pitch)を計算及び出力させて、船舶やUGV、ドローン等の自動運転に適用可能であることを検証します。
(画像はプレスリリースより)